 Kutatás vezetője: Nagy-György Judit
Kutatás vezetője: Nagy-György Judit
Szervezet: University of Szeged
Leírás: Az önvezető autók fejlesztése a mesterséges intelligencia egy fontos alkalmazási területe. A Robert Bosch Kft. többek között vezetést támogató rendszerek fejlesztésével is foglalkozik. A videó alapú vezetéstámogató rendszerek fejlesztése során felmerülő problémák között fontos kérdés, hogy a videóképek értelmezése, és ez alapján lehetséges útvonal megtervezése hogyan megvalósítható. Az alapfeladat a képek alapján vonalak meghatározása, amelyek segítségével meghatározhatóak a megengedett útvonalak. A legegyszerűbb vonalkövető algoritmus elkészítése sem egyszerű, ezt a feladatot számos tényező nehezíti a gyakorlatban. Biztonsági okok miatt nagyon fontos a probléma minél pontosabb megoldása.
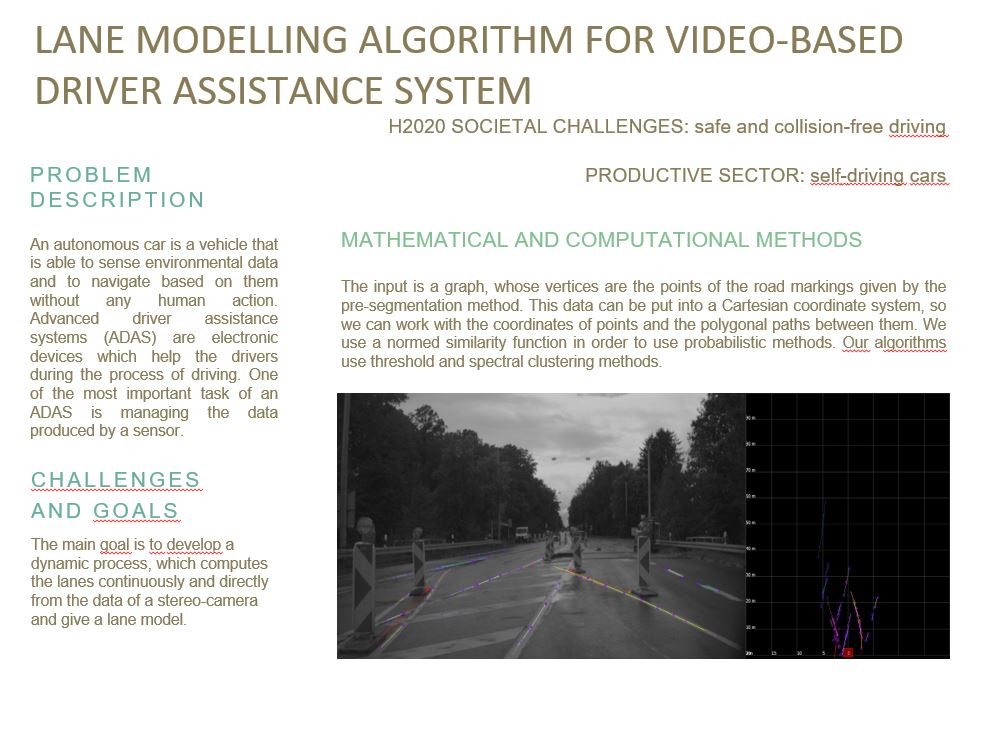
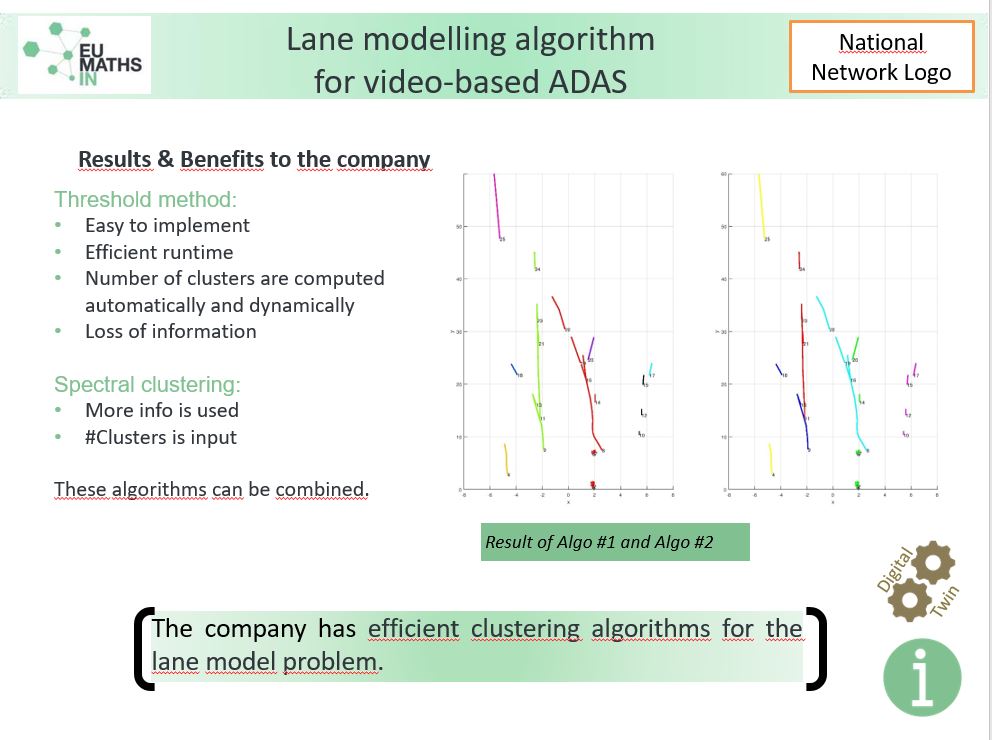
An autonomous car is a vehicle that is able to sense environmental data and to navigate based on them without any human action. Nowadays, the development of self-driving cars and driver assistance systems belongs to the most dynamic industrial projects. Advanced driver assistance systems (ADAS) are electronic devices which help the drivers during the process of driving. One of the most important task of an ADAS is managing the data produced by a sensor. The main goal here is to present algorithms which process data of a stereo-camera and give a lane model based on only these data. Critical decision making is the key to autonomy and is realised through planning algorithms. The main purpose of planning is to provide the vehicle with a safe and collision-free path towards its destination.